Robotically Driven Construction of Buildings (RDCB) is an exploration into holistic/integral design to production solutions for robotically driven construction of buildings by involving the disciplines of architecture, robotics, materials science, construction and building technology, and structural design. The team integrates knowledge from the individual disciplines in order to develop new numerically controlled manufacturing techniques and building-design optimizations for adding creative values to buildings in a cost-effective and sustainable way.

This project is in line with Europe’s aims for improving material sustainability and energy efficiency of buildings and construction processes. Robotically driven construction and customized building material systems have the potential to realize this in a cost-effective way and at the same time reduce accidents and health hazards for workers in the building sector. In order to achieve this RDCB is distributing materials as needed and where needed. This requires exploration of a variety of techniques and implies working with customized materials while finding the best methods of applying materials in the logic of for example specific force flows or thermal dissipation patterns.
RDCB advances multi- and trans-disciplinary knowledge in robotically driven construction by designing and engineering a new building system for the on-demand production of customizable building components. The main consideration is that in architecture and building construction the factory of the future employs building materials and components that can be on site robotically processed and assembled.

At the Delft University of Technology (TUD) two groups of researchers and students have explored possibilities of implementation of robotics in architectural design and building material systems. While at the Civil Engineering Department the focus was to study the production of suitable recycled fine aggregates to be used in robotically aided construction processes, for the Hyperbody group at the faculty of architecture at TU Delft, the focus was on developing a robotic setup as an integrated design to production system for Additive Manufacturing supported by customized Computer Aided Design procedures.

The aim of the project at Eindhoven University of Technology (TU/e) was to create knowledge about robotically construction methods and possible applications of this methods. The process was divided into different stages: brainstorm sessions, design meetings and the realization of the product. It has been done with a team of students with different backgrounds: Structural Design (SD), Building Technology (BT) and Construction Technology (CT).
Robotically Driven Construction of Buildings is distributing materials as needed and where needed.
Interdisciplinary brainstorm
The first meeting introduced the purpose of this project: a robotically created product for the building industry. Because of the variation in building industry disciplines the TUE group was divided into brainstorm teams with the specializations SD, BT and CT. Every discipline explored what they could do with robots within their own specialization. The directive given was: think about possible design-optimizations in order to improve for example sustainability, durability, material-usage and space-usage. In this process the students created their own visions about the new design possibilities considering different robot construction methods. This resulted in three different ideas with common points: building design adaptability, unique shapes (greater design freedom) and effective integration of different disciplines in construction components. The team of TUE continued with studio RAP a design and fabrication studio focusing on robotically controlled fabrication methods within the building processes, to design the possible scenarios for realization of the prototype with the robot.

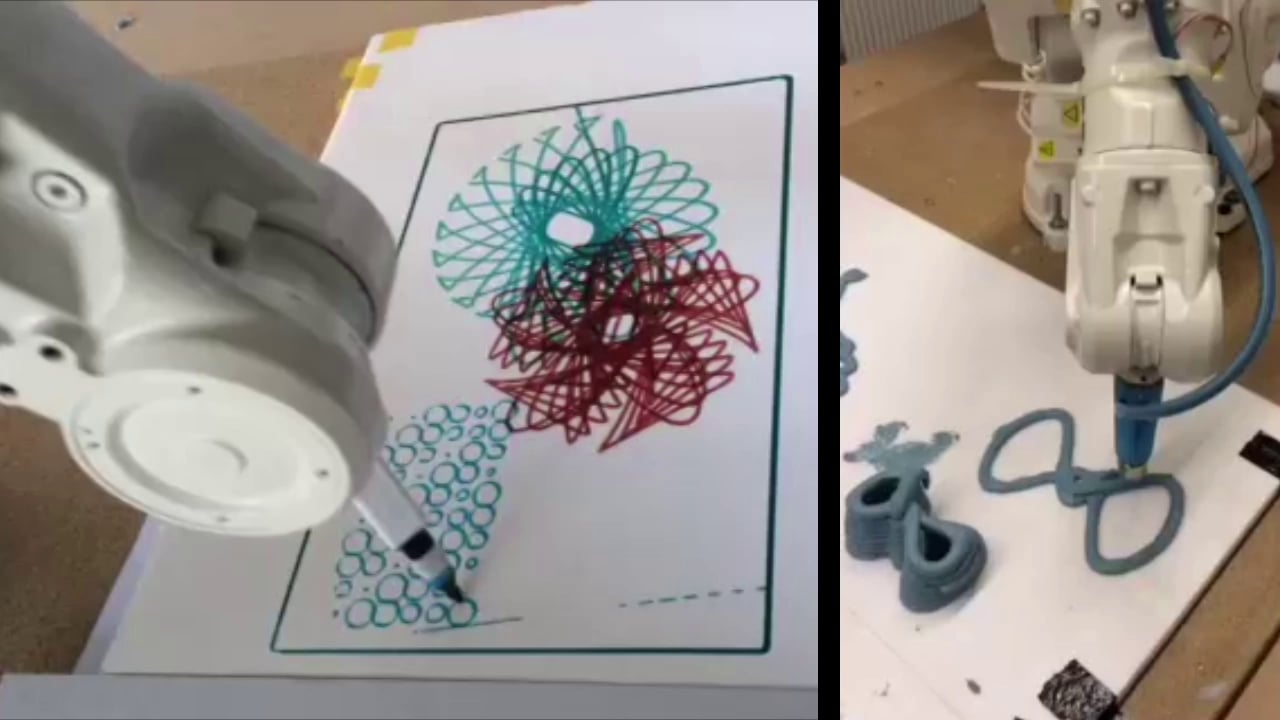
At Delft, the process of experimentation with robotic arms started in the beginning of the project to inform the design processes at the very early stages to establish a direct link between design and production. This way the team was not only able to explore different design variations and possibilities to be produced only by robotic 3D printing, but also was able to adjust, customize and develop the required design tools to production system, considering both material behaviours and the evolving design outcomes.
Design development
At each university objectives and ideas behind making the prototpyes are:
TU/e;
- A façade of a building with a segment of a floor.
- optimizing the geometry based on structural behavior.
- Open parts of the optimized topology of the façade to be used as ‘windows’.
- The floor-construction is inspired from a leaf’s shape, and thicker parts in the floor can be used for tubes and installations.
- Using robotic subtractive methods of production to create complex moulds to cast the designed parts in concrete
TUD;
- Developing and establishing proper computational design methods for a compression-only structure considering the innate characteristics of the material.
- Translating the results of design and material distribution analysis into robotic motion paths for material deposition.
- Making a part of the designed pavilion with the developed robotic 3D printing system for extruding clay ceramics.
- considering porosity of material in different scales ranging from Macro(scale of architectural elements like openings and building envelop) to Micro (scale of material distribution or material architecture).
Results, prototypes and future steps
The results of the RDCB project can be discussed at two levels of fundamental and applied research, which are realized through making the prototypes by each university. Researchers at the civil engineering department of TUD have made studies on recycled concrete as well as studies on the use of possible natural materials on a fundamental level. The applied research of the Hyperbody group can provide the required supporting knowledge for further improvement of application of robotic additive manufacturing in the building industry. In combination, the results of on the one hand material based research as the development of computational and parametric design strategies can bridge the gap between early stages of design and production process.
At TU/e, analysis of the experienced design to fabrication process, using a robotic subtractive manufacturing method can lead to a comparison between CNC milling methods with robotically supported manufacturing techniques to specify the advantages of application of robots or robotization in some parts of building industry.
Using robotically driven tools enhances design adaptability, greater design freedom and effective integration of different disciplines in construction components.
Eventually both series of experiments and prototypes - the casted concrete components of TU/e in robotically produced moulds and porous robotically 3D printed building prototypes of TUD in ceramics – specify to a certain degree what is possible and what is not and can define the future roles of robotics in building industry. In this context the next step for future explorations and prototyping can focus on simultaneous and/or sequential combination of these processes, supported by multiple robots to illustrate and define some of the characteristics of future programmable building factories.

Project Team
Delft University of Technology
Dr.-Ing. Henriette Bier
M.Arch. Sina Mostafavi
ir. Ana Anton
ir. Serban Bodea
Berend Raaphorst
Guus Mostart
Hans de Jonge
Jeroen van Lit,
Jan Paclt
Kasper Siderius
Marco Galli
Michal Kornecki
Mohammad Jooshesh Oana Anghelache
Perry Low
Radoslaw Flis
Rob Moors
Rutger Roodt
Ruth Hoogenraad
Stef Hoeijmakers
Steph Kanters
Thijs IJperlaan
Prof. dr. Peter Rem
Somayeh Lotfi
Eleonora di Domenica
Eindhoven University of Technology
prof dr. ir. Theo Salet
Jordy Vos
Adrie van der Burgt
Bas van Wezel
Christiaan Voorend
Chiel Bekkers
Iris Rombouts
Luc Gerlings
Marieke de Vries
Marijn Bruurs
Rob Wolfs
Siert Saes
Tim Span
Wout Rouwhorst
Hyperbody drawing robot experiments: